现代很多的PBR游戏,大家首先关注的是PBR的材质,但是实际上PBR( Physically-Based Rendering )流程除了基于物理的材质模型,还由另外两部分组成,一个是物理光照,另外一个是物理相机。
在很多引擎中虽然早已是走的PBR的渲染流程,但是开放给开发者的光照参数依然是一个无单位的值。这可能是为了降低一些开发的门槛。这同时也带来一些局限,无单位的值只能通过艺术家们的感觉和经验进行判断。

unity在HDRP上引入了物理相机/灯光/的概念,本质上是游戏引擎从经验驱动转向物理驱动的结果,游戏和电影开发者能够通过现实中的光测数据以及相机数据,精准的控制画面的表现,同时也引入了很多物理单位,下面让我们来了解一下曝光的整个流程。
原理 #
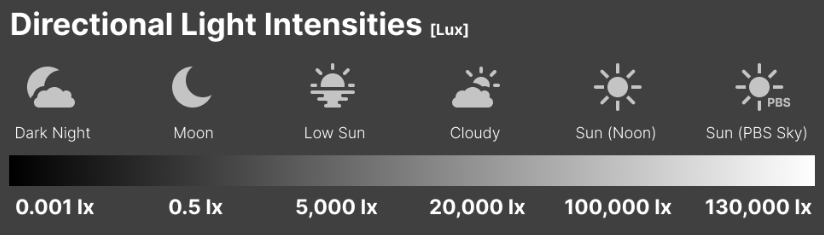
HDRP中,官方很贴心的给了我们一张表,告诉我们哪个环境下使用什么样的曝光值。

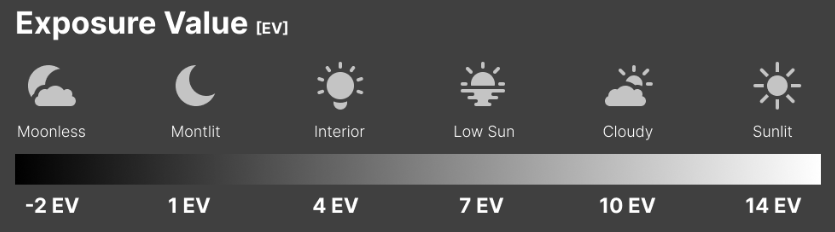
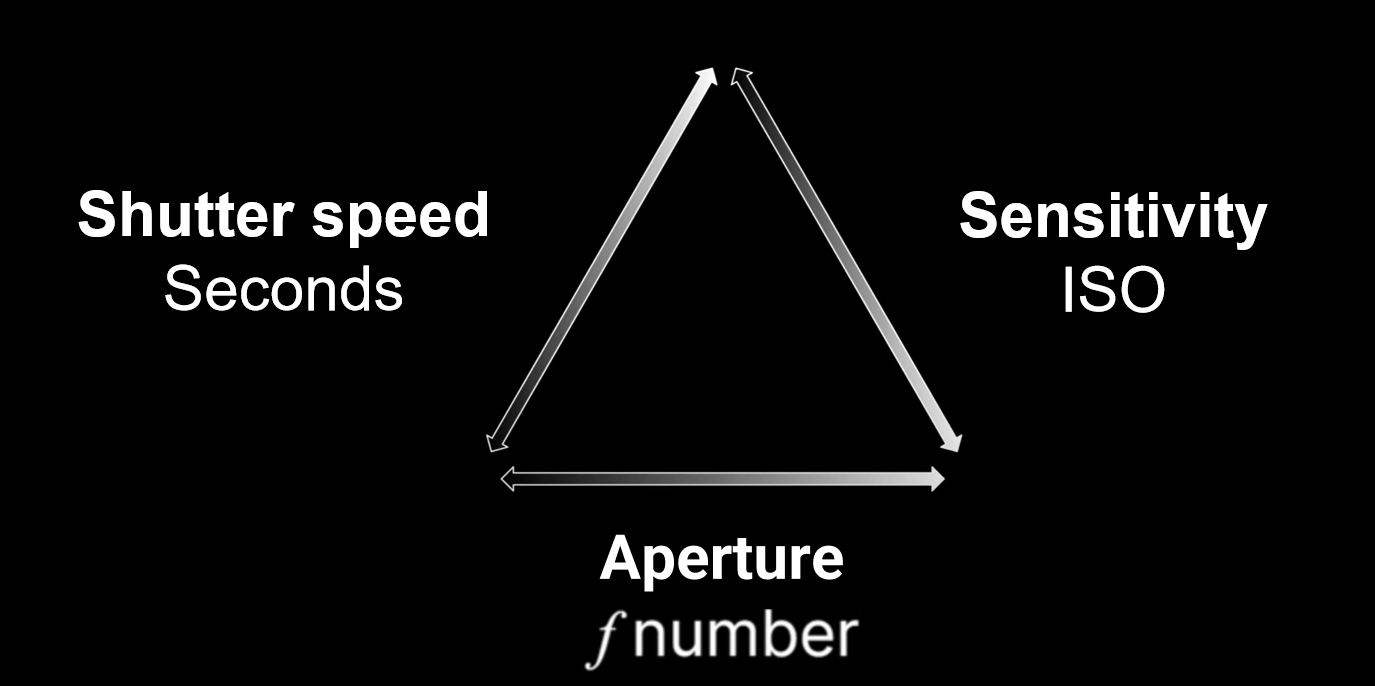
那么这些曝光值是从哪来的呢?现代相机中存在三个参数影响了曝光:ISO,ShutterSpeed,Aperture。
- 光圈(Aperture):通常称为f值,表示镜头的焦距与镜头开口直径的比率。开口越大,进入相机并被传感器捕获的光线就越多。常用值为 f/1.4、f/2.0、f/2.8、f/4.0等。

- 快门速度(shutter speed) : 快门速度表示相机的传感器或胶片主动收集光线的时间,通常以秒的分数(1/60s、1/200s)表示。
- ISO:传感器对入射光的 ISO 或灵敏度。通常,ISO 值从 100 开始,成倍增长。
EV(Exposure Value)则是通过这三个参数计算得出的。我们常见的EV100 时,就是以 ISO 100 作为标准感光度来计算曝光值的。厂商通过测光表实测不同天气下的光照强度,结合标准EV表(基于ISO 100的光圈/快门组合)生成推荐值。
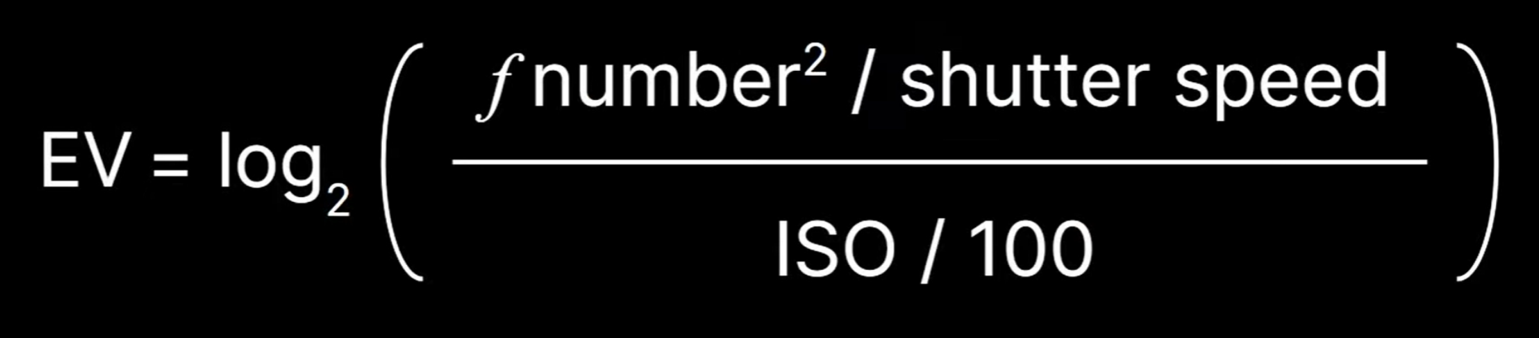
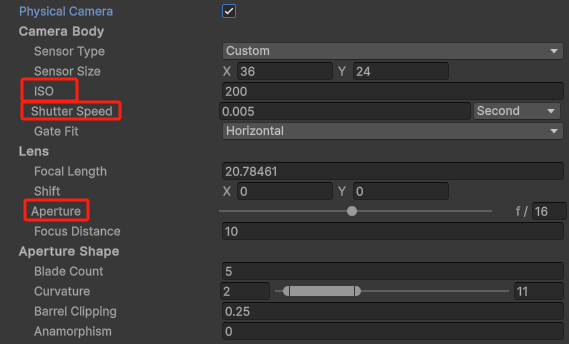
HDRP的相机开启物理相机后,就能设置对应的ISO,ShutterSpeed,Aperture数据了,这些数据会根据公式计算出EV值。

结合设置物理灯光亮度,我们能得到一个和现实中拍摄一样的画面表现。
虽然对于我们光栅化流程 (详见我的另一个Blog提到的渲染管线)来说,实际上是没有相机建模的,最终还是用计算出一个EV值给到渲染管线中去进行渲染。但是通过对相机参数的设置,我们能够确定一个基于现实中的曝光基调,再通过这个基调进行实际的调整。
相比于照片,游戏的曝光的复杂度在于不同的光照环境下, 我们需要不同的曝光度,即使是有了现实中EV值的参考,但是依旧是需要为特定的游戏环境来微调不同的EV值,这也是不小的工作量,还有就是,场景中可能同时存在室内+室外的场景,以及玩家视角的不断移动,我们需要正确的曝光过渡才能正确的渲染出画面。
自动曝光就是来解决这个问题的,同样的模仿了现实中的相机的测光策略:
游戏中最常见的是重点测光模式:更多的考虑画面中心的亮度,因为游戏的焦点以及主角的位置通常是画面的中心。
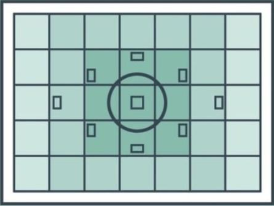
自动曝光做的事情就是,采样整个画面的亮度,根据不同权重计算出平均值,再通过曝光调整将画面拉到一个合适的亮度。
而这个亮度的标准叫中度灰:

有意思的是,但是由于我们人眼对于灰阶的感知并不是线性的,所以中间的灰调并不是50%,根据前人的规律总结,有几种常见的中度灰色:


黑手党1中的自动曝光:Mafia_ Definitive Edition 2025-03-08 20-05-57.mp4
自动曝光实现 #
在后效的第一个Pass中就开始自动曝光的处理工作,在Bloom/ColorGrading这些之前,因为正确的曝光是其他后处理效果的前置条件。
CPU:
TextureHandle RenderPostProcess() {
var source = inputColor;
....
source = DynamicExposurePass(renderGraph, hdCamera, source);
TextureHandle bloomTexture = BloomPass(renderGraph, hdCamera, source, m_LensFlareScreenSpace.bloomMip.value, out screenSpaceLensFlareBloomMipTexture);
TextureHandle logLutOutput = ColorGradingPass(renderGraph, hdCamera);
....
}
可以看到用三个Pass完成了渲染。
第一个pass:主要作用是降采样整个屏幕像素的亮度并转换为EV100值,以及计算权重。
float SampleLuminance(float2 uv)
{
// 这里获取了上一帧的平均亮度信息,单位是cd/m^2
// prevExposure 为亮度值的倒数
float prevExposure = ConvertEV100ToExposure(GetPreviousExposureEV100(), LensImperfectionExposureScale);
float3 color = SAMPLE_TEXTURE2D_X_LOD(_SourceTexture, s_linear_clamp_sampler, uv, 0.0).xyz;
// 根据上一帧的曝光还原原始辐射值,再转换为亮度输出
return Luminance(color / prevExposure);
}
float WeightSample(uint2 pixel, float2 sourceSize, float luminance) {
// 经典的Center-weighted,中心画面权重高
float screenDiagonal = 0.5f * (sourceSize.x + sourceSize.y);
const float2 kCenter = sourceSize * 0.5f;
return 1.0 - saturate(pow(length(kCenter - pixel) / screenDiagonal, 1.0));
}
// CPU端传入 这里unity是直接将中度灰定义为12.5
float MeterCalibrationConstant = 12.5f;
// 根据EV = log2 (LS / K) 这里 L 是亮度, S是100 ISO 以及中间灰作为矫正常数
// 计算出矫正后的EV100值。
float ComputeEV100FromAvgLuminance(float avgLuminance, float calibrationConstant)
{
const float K = calibrationConstant;
return log2(avgLuminance * 100.0 / K);
}
[numthreads(8,8,1)]
void KPrePass(uint2 dispatchThreadId : SV_DispatchThreadID)
{
。。。
float2 uv = GetScreenUV();
float luma = SampleLuminance(uv);
float weight = WeightSample(dispatchThreadId, PREPASS_TEX_SIZE.xx, luma);
float logLuma = ComputeEV100FromAvgLuminance(max(luma, 1e-4), MeterCalibrationConstant);
//最终输出两数值,一个是像素的亮度转换而成的EV100值,一个是权重
_OutputTexture[posInputs.positionSS] = float2(logLuma, weight);
}
第二个Pass:将1024x1024的(EV100值, 权重)图进行均值计算,分为32x32个线程组,每个组32个线程。
[numthreads(REDUCTION_GROUP_SIZE,REDUCTION_GROUP_SIZE,1)]
void KReduction(uint2 groupId : SV_GroupID, uint2 groupThreadId : SV_GroupThreadID) {
// 每个线程处理2x2像素块
uint2 sampleIdx = (groupId.xy * REDUCTION_GROUP_SIZE + groupThreadId.xy) * 2u;
float2 p1 = _InputTexture[sampleIdx + uint2(0u, 0u)].xy;
float2 p2 = _InputTexture[sampleIdx + uint2(1u, 0u)].xy;
float2 p3 = _InputTexture[sampleIdx + uint2(0u, 1u)].xy;
float2 p4 = _InputTexture[sampleIdx + uint2(1u, 1u)].xy;
// 分解亮度和权重
float4 smp = float4(p1.x, p2.x, p3.x, p4.x);
float4 weights = float4(p1.y, p2.y, p3.y, p4.y);
// 乘积并存入groupSharedMemory
gs_luminances[threadIdx] = smp * weights;
gs_weights[threadIdx] = dot(weights, 1.0);
// 组内完成同步,确保同group内的线程都计算完成
GroupMemoryBarrierWithGroupSync();
//并行归约 (4像素->2像素->像素)
//合并组内全部像素的亮度和权重
for(uint s = REDUCTION_TOTAL_THREADS / 2u; s > 0u; s >>= 1u)
{
if(threadIdx < s)
{
gs_luminances[threadIdx] += gs_luminances[threadIdx + s];
gs_weights[threadIdx] += gs_weights[threadIdx + s];
}
GroupMemoryBarrierWithGroupSync();
}
//组内第一个线程去操作,将所有结果输出
if(threadIdx == 0u)
{
_OutputTexture[groupId.xy] = float2(avgLuminance, gs_weights[0]);
}
}
第三个Pass实际上就是又执行了一遍,将32x32平均到1x1,最终转换为(曝光值, EV100值)
{
。。。
if(threadIdx == 0u) {
float avgLuminance = dot(gs_luminances[0], 0.25);
if (IsNaN(avgLuminance) || IsInf(avgLuminance))
avgLuminance = 1.0;
if (gs_weights[0] > 0.0)
avgLuminance /= (gs_weights[0] * 0.25);
//取上一帧的rt进行lerp,防止曝光突变。
float exposure = AdaptExposure(avgLuminance - ParamExposureCompensation);
exposure = clamp(exposure, ParamExposureLimitMin, ParamExposureLimitMax);
_OutputTexture[groupId.xy] = float2(ConvertEV100ToExposure(exposure, LensImperfectionExposureScale), exposure);
}
}
最终在渲染下一帧的时候,光照计算读取最终曝光值做乘积。
//在下一帧中
diffuseLighting *= GetCurrentExposureMultiplier();
specularLighting *= GetCurrentExposureMultiplier();
其他问题 #
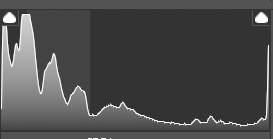
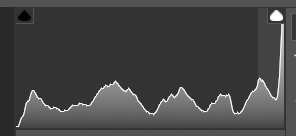
当整个画面的动态范围(画面中“最亮”到“最暗”的比值)非常大的时候,会出现的问题就是如果亮部曝光正确,则暗部细节丢失,如果拉高曝光,则亮部信息丢失。例如从山洞中走出。由于中心加权特性,导致外面曝光正常,但是主角的暗部细节完全丢失了。

拉高曝光,则天空整个过曝了。

通过直方图也很简单的能看出信息丢失的情况。
tonemapping在一定程度上能缓和过曝的区域,但是如果原始数据已经过曝严重,tonemapping也无法恢复丢失的细节。如果不想改Tonemapping的话可以和美术沟通加一个LUTs(虽然这会违背物理正确)


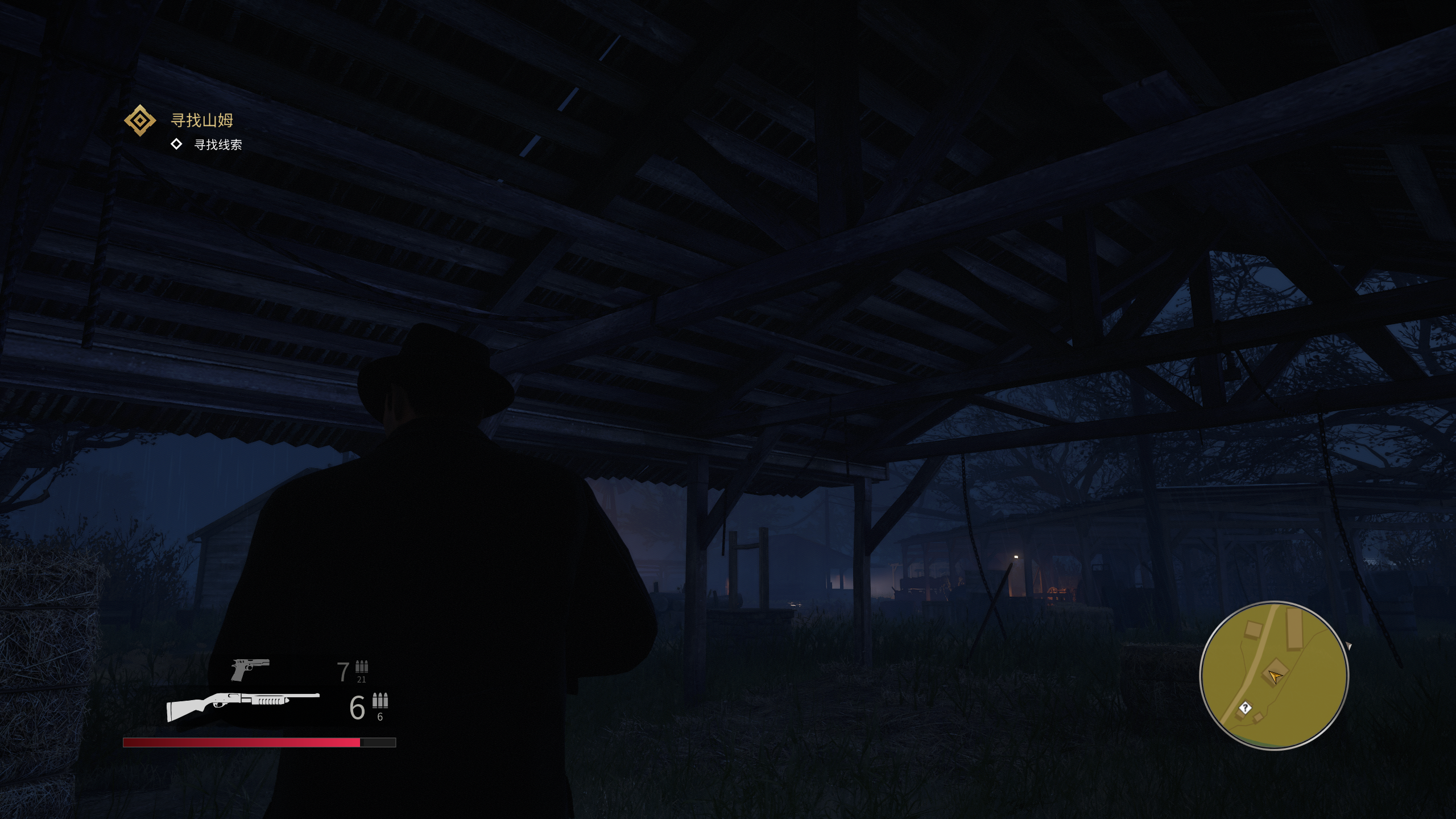
解决方式:一般来说只能从场景设计方面去规避,一方面是避免制作巨大亮度差异的场景,另外一个方法就是和现实中的摄影一样,对场景进行补光:
例如下图,正常情况下,屋顶下应该是死黑,但是通过补光来弥补暗处的信息,虽然这不物理,但是work了。
还有一些游戏的做法是在角色身上挂点光源 例如黑猴子:

引用 #
https://en.wikipedia.org/wiki/Middle_gray
https://knarkowicz.wordpress.com/2016/01/06/aces-filmic-tone-mapping-curve/
https://bartwronski.com/2016/09/01/dynamic-range-and-evs/
https://en.wikipedia.org/wiki/Exposure_(photography)
Reply by Email