写在前面 #
这两套渲染方案,每一个渲染方案对应的是硬件层面(IMR、TBDR)和软件层面(Foward、Deferred),对应的是目前主流的两套方案:移动端渲染方案和电脑端渲染方案
为什么不同类型设备会采用不同方案? #
这要从移动端的性能敏感说起。直接上图:
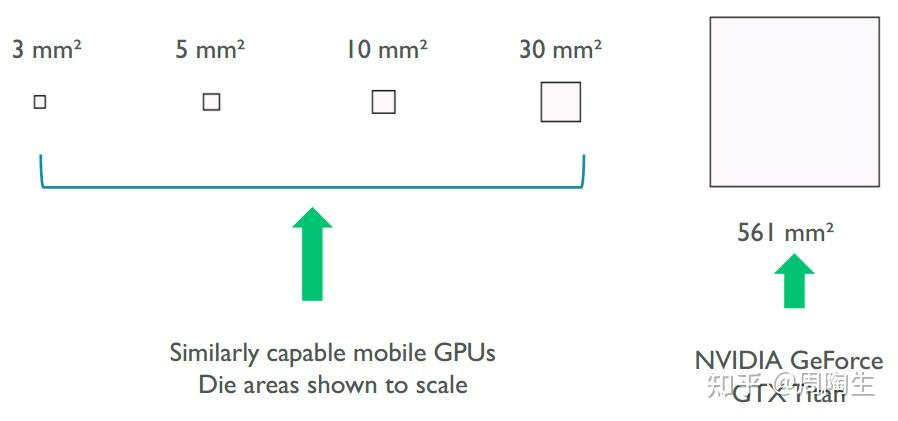
相机也有一句话说的是“底大一级压死人”,这句话同样也可以应用在芯片设计中。(~~光是看着面积就知道很吓人了)~~同时,桌面端直接利用电源供电,仅算上GPU就可以获得高达375W的功率,不仅能在算力上“力大飞砖”,同时同样的功能,桌面端的指标明显要优异于移动端。更别说芯片面积受限,On-Chip Memory(L1/L2缓存)容量要比桌面端更小(的多)。好的,现在我们知道了手机的算力天生就要比电脑小得多,接下来就先从硬件结构上说明这两个硬件渲染方法:TBDR/IMR。
TBDR/IMR #
隶属于硬件层面的渲染架构,不可以进行两者间的切换。
TBDR: Tile-Based Deferred Rendering #
TBDR大致可以分为三个模块:Binning Pass, Rendering Pass, Resolve Pass.
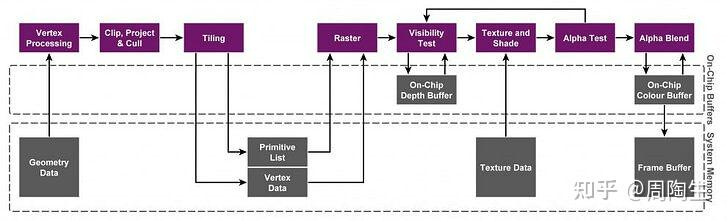
- 最上一层:Render Pipeline (渲染管线)
- 中间一层:On-Chip Buffer(a.k.a. 片上内存,Tiled Frame Buffer & Tiled Depth Buffer)
- 最下一层:系统内存,CPU和GPU共享
Binning Pass: #
目标:将几何数据(顶点、三角形)分配到对应的屏幕小块(Tile)中,为后续渲染做准备。
流程步骤:
- 顶点处理:
- 顶点着色器(Vertex Shader)会接收来自软件层面的顶点数据,处理顶点数据,计算顶点的屏幕坐标(投影到屏幕空间)。
- 简化处理:部分GPU(如Adreno)可能使用简化版顶点着色器,仅计算顶点位置,忽略纹理坐标、法线等细节(这些在分块阶段不需要)。
- 分块分配:
- 将屏幕划分为固定大小的 Tile(如16x16像素的小方块)。
- 遍历所有三角形,确定每个三角形覆盖了哪些 Tile。
- 将覆盖的 Tile 记录到 Primitive List(图元列表)中,记录每个 Tile 包含哪些三角形。
- 数据存储:
- 将每个 Tile 的 Primitive List 和顶点数据写入 系统内存(aka. LPDDR)。
- 关键点:分块阶段仅记录几何信息,不进行光栅化或像素着色。
参与组件:
- Tiler 单元:负责将三角形分配到对应的 Tile。
- 顶点着色器:处理顶点坐标。
- 系统内存:存储分块后的几何数据(Primitive List)。
Rendering Pass: #
目标:逐 Tile 处理几何数据,完成光栅化和像素着色,结果暂存到片上内存(On-Chip Memory)。
流程步骤:
- Tile 遍历:
- 按顺序处理每个 Tile(如从左到右、从上到下)。
- 几何处理:
- 重新处理顶点:读取该 Tile 的 Primitive List,重新执行顶点着色器(这次会完整计算顶点属性,如纹理坐标、法线等)。
- 裁剪与剔除:进行背面剔除、视锥体剔除等,减少无效三角形。
- 光栅化(****Rasterization):
- 将三角形转换为该 Tile 内的像素(片元)。
- 深度测试(Z-Test):利用 HSR(Hidden Surface Removal,隐藏面消除) 或 LRZ(Low Resolution Z) 技术,快速剔除被遮挡的片元,减少不必要的像素着色计算。(需要注意的是,虽然我们认为IMR可以“不切实际的进行高强度运算”,但是它同样可以采用Early-Z/Pre-Z来进行剔除并减少overdraw)
- 像素着色:
- 开始执行像素着色器(Fragment Shader),计算每个片元的颜色、光照等。
- 结果暂存:将处理后的像素数据写入 片上内存(Tile Buffer)。
参与组件:
- 光栅化引擎:将三角形转换为像素。
- 像素着色器:处理像素颜色和光照。
- HSR/LRZ 单元:隐藏面消除,减少过绘制(Overdraw)。
- 片上内存:临时存储 Tile 的渲染结果(颜色、深度缓冲等)。
Resolve Pass: #
目标:将所有 Tile 的渲染结果合并到最终的帧缓冲区(Frame Buffer)。
流程步骤:
- 合并 Tile 数据:
- 将每个 Tile 的 Tile Buffer 内容(颜色、深度等)从片上内存写入系统内存的帧缓冲区Framebuffer。
- 多采样抗锯齿(MSAA):如果启用了 MSAA,此时会直接将多个样本点合并为最终像素颜色。这里由于Tile的像素数据直接按块存在于片上内存,极大提高了MSAA的缓存命中率(直接采样点即可而不需要从片外内存读取Framebuffer)。这也是为什么MSAA在低性能移动端的性能损耗会小于TAA。但是,MSAA的每个像素存储多个样本点(如4x MSAA占用4倍显存),在移动端设备中,显存容量有限(如低端设备仅1-2GB),可能导致显存不足或CPU和GPU间的左右脑互搏,带宽竞争。
- 清理与提交:
- 清除片上内存中的临时数据(如深度缓冲)。
- 将完成的帧提交给显示屏。
参与组件:
- ROP(光栅操作单元):合并 Tile 数据并执行最终的写入操作。
- 系统内存DDR:存储最终的帧缓冲区。
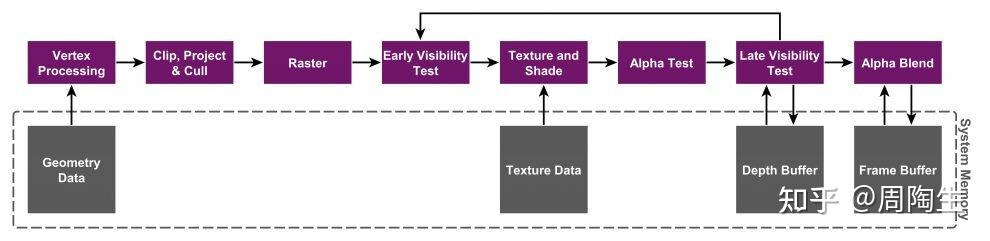
IMR: Immediate Mode Rendering #
IMR的渲染流程分为以下4个核心阶段:Vertex Process, Rasterizer, Pixel Shading, Merge.
Vertex Process #
目标:将顶点数据转换为屏幕空间坐标,并执行顶点着色器计算。
参与组件:
- 顶点缓冲区(Vertex Buffer):存储顶点的原始数据(坐标、法线、纹理坐标等)。
- 顶点着色器(Vertex Shader, VS):GPU的可编程单元,负责计算顶点的最终位置、颜色、纹理坐标等。
- 固定功能单元(Fixed-Function Units):
- 顶点属性组装(Vertex Assembly):将顶点数据从内存加载到GPU内部缓存。
- 投影变换(Projection Transform):将顶点坐标从模型空间转换为屏幕空间。
- 缓存(L1/L2 Cache):减少顶点数据从主存重复读取的延迟。
流程:
- 顶点数据从系统内存加载到GPU的顶点缓冲区。
- 顶点着色器对每个顶点执行计算(如光照、动画变形)。
- 处理后的顶点数据通过固定功能单元完成投影变换,得到屏幕坐标。
Rasterization #
目标:将三角形转换为像素(片元),并进行深度测试(Early-Z)。
参与组件:
- 光栅化单元(Rasterizer):负责将三角形分解为像素级别的片元。
- 深度缓冲区(Depth Buffer):存储每个像素的深度值,用于隐藏面消除(Z-Test)。
- 裁剪单元(Clipping Unit):剔除超出视口的三角形。
流程:
- 光栅化单元将三角形的顶点坐标扩展为覆盖的像素区域。
- 每个像素生成一个片元(Fragment),并计算其深度值。
- 片元通过Early-Z测试:若深度值小于Depth Buffer中的值,则保留;否则丢弃。
- 未被丢弃的片元传递给像素着色器处理。
Pixel Shadeing #
目标:计算每个片元的最终颜色值。
参与组件:
- 像素着色器(Pixel Shader, PS aka. Fragment Shader, FS):对通过Early-Z的片元执行光照、纹理采样等计算。
- 纹理单元(Texture Units):从纹理内存加载纹理数据(如法线贴图、颜色贴图)。
- 固定功能插值单元:对顶点属性进行插值(如颜色、纹理坐标)。
流程:
- 片元通过插值单元获取顶点属性的插值结果(如像素颜色、纹理坐标)。
- 像素着色器根据插值后的数据、纹理采样结果及光照模型计算最终颜色。
- 若启用了Alpha测试(Alpha Test),部分片元可能被丢弃。
Merger #
目标:将片元颜色写入Frame Buffer,并执行混合(Blending)和深度更新。
参与组件:
- 混合单元(Blending Unit):根据混合方程(如透明度)合并新颜色与已有颜色。
- 深度Stencil单元:执行Late-Z测试和Stencil Buffer操作。
- Frame Buffer(颜色缓冲区):存储最终像素颜色。
- Depth Buffer:存储深度值,用于后续帧的深度测试。
流程:
- 通过像素着色的片元进入Late-Z测试(若未通过Early-Z)。
- 混合单元将新颜色与Frame Buffer中的颜色混合(如透明物体叠加)。
- 更新Frame Buffer和Depth Buffer,完成像素输出。
电脑端参与的组件: #
硬件组件: #
- GPU核心模块:
- 计算单元(Shader Cores):执行顶点着色器、像素着色器。
- 光栅化引擎:处理光栅化和深度测试。
- 内存控制器:管理与系统内存的交互。
- 缓存结构(片上内存):
- L1/L2 Cache:缓存顶点数据和中间结果。
- Texture Cache:加速纹理采样。
- 显存(VRAM):
- 存储Frame Buffer、Depth Buffer、纹理等数据。
软件组件: #
- 图形API(如DirectX、OpenGL):
- 管理顶点缓冲区、渲染状态(如混合模式、深度测试)。
- 驱动程序:
- 将API命令转换为GPU可执行的指令流。
- 着色器代码:
- 顶点着色器、像素着色器的可编程逻辑。
Forward搭配TBDR,而Deferred则会搭配IMR? #
这就要说到缺点了。虽然Forward在目标实现接近于IMR(两者的目的都是需要及时渲染),按理来说应该是Forward+IMR。我们来简要过一下两个渲染管线:
Forward管线流程 #
- 顶点处理:顶点着色器计算顶点坐标、法线等。
- 光栅化:生成片元并进行Early-Z测试。
- 片段处理:
- ForwardBase Pass:计算主光源(如Directional Light)。
- ForwardAdd Pass:为每个附加光源(点光源、聚光灯)单独渲染,叠加光照。
- 需要注意的是,在URP14中,ForwardAdd Pass被取消,为了简洁化,可以直接调用GetAdditionalLightsCount()。但是底层实现逻辑仍然一致。
- LightAdd in URP14:
#ifdef _ADDITIONAL_LIGHTS
int additionalLightsCount = GetAdditionalLightsCount();
for (int i = 0; i < additionalLightsCount; ++i)
{
Light light = GetAdditionalLight(i, input.positionWS);
// 简单的Lambert漫反射
half3 additionalLambert = CalculateLambert(N, light.direction, light.color, light.distanceAttenuation * light.shadowAttenuation);
additionalLightsColor += baseColor.rgb * additionalLambert * _AdditionalLightsIntensity;
}
#endif
- 混合与输出:将结果写入Frame Buffer。
Deferred管线流程 #
- 顶点处理:仅计算顶点坐标,不处理光照。
- 光栅化:开始采集并生成G-Buffer(存储几何数据:位置、法线、颜色、材质属性等)。
- 光照Pass:遍历屏幕像素,根据G-Buffer数据计算所有光源对像素的影响。在这一阶段, 会在屏幕上逐像素执行光照,不再访问场景几何 。
- 混合与输出:将结果写入Frame Buffer。

发现了没有?Deferred管线这里多了一个Gbuffer。这个Gbuffer是什么呢,这是一个会储存在**片外内存(对应桌面端的VRAM,移动端的LPDDR)**的Buffer。
延迟渲染需要将几何属性(如位置、法线、材质参数、颜色等)存储到 Gbuffer的多张渲染目标(Render Targets, RT) 中,例如:
- Position RT:存储像素的三维位置。
- Normal RT:存储法线向量。
- Albedo RT:存储基础颜色。
- Depth RT:存储深度信息。
虽然deferred在多光源计算的性能消耗明显优于forward管线,那么代价是什么呢?代价是deferred虽然可以一次性解决屏幕的所有物体渲染,不需要逐物体渲染;但是这个条件的前提是你的Gbuffer可以迅速地从系统内存读取到计算单元中并作计算。更别说你还没有开启MSAA(4xMSAA=从Gbuffer采样四次,带宽要求直接x4),TAA(从Framebuffer的时域采样,直接*n帧带宽)。
另外,由于Gbuffer不会存储透明物体数据,因为Deferred渲染的核心是几何处理阶段(Geometry Pass),将所有不透明物体的几何信息(如位置、法线、材质属性、深度)写入G-Buffer(多个渲染目标)。
也就是说,如果还要加一个透明处理,就意味着:
- 可以用加一个Forward管线单独处理,但是这会脱离Gbuffer,导致Deferred的屏幕空间效果不起作用
- 单独开一个Gbuffer接着渲染。再次从片外内存读写一遍。
对比复杂度 #
最后对比一下算法(由通义生成):在分析延迟渲染(Gbuffer + IMR)与前向渲染(+ TBDR)的带宽压力差异时,需要从渲染流程、数据存储方式、架构特性 三个维度进行对比。
1. 延迟渲染(Gbuffer + IMR)的带宽压力来源 #
(1) Gbuffer的存储与传输 #
- Gbuffer的定义:
- 延迟渲染需要将几何属性(如位置、法线、材质参数、颜色等)存储到 多张渲染目标(Render Targets, RT) 中,例如:
- Position RT:存储像素的三维位置。
- Normal RT:存储法线向量。
- Albedo RT:存储基础颜色。
- Depth RT:存储深度信息。
- 延迟渲染需要将几何属性(如位置、法线、材质参数、颜色等)存储到 多张渲染目标(Render Targets, RT) 中,例如:
- 带宽消耗点:
- 初始化阶段:渲染所有几何体时,必须将所有可见像素的几何属性写入Gbuffer,这需要 多次系统内存写入。
- 光照阶段:每个光源的计算需要读取Gbuffer中的所有RT数据(如法线、位置、材质),导致 多次系统内存读取。
- 屏幕分辨率越高,Gbuffer的带宽需求呈线性增长(如1080p屏幕需要约200万像素 × 多个RT通道)。
(2) IMR架构的劣势 #
- 直接写入系统内存:
- 在IMR架构下,Gbuffer的写入和读取均直接通过 系统内存(VRAM) 进行,无法利用片上内存暂存中间结果。
- 频繁的读写操作:例如,每个光源的计算需读取所有RT数据,带宽压力随光源数量线性增长。
- 抗锯齿(MSAA)的额外开销:
- 若启用MSAA,Gbuffer的每个像素需存储多个样本点的数据(如4x MSAA需4倍存储空间),进一步增加带宽需求。
- 对于读写速度的刚需:
- Gbuffer的显存带宽需求在移动端是致命的(如1080p屏幕下,四张Gbuffer的带宽消耗可达 2GB/s,而移动端总带宽仅30GB/s)。
- 延迟渲染需要 多张RT,导致显存带宽成为瓶颈。
2. 前向渲染(+ TBDR)的带宽优化 #
(1) TBDR架构的优势 #
- 分块处理与片上内存暂存:
- 分块(Tiling):将屏幕分割为小Tile,每个Tile的渲染数据(颜色、深度、模板)暂存在 片上内存(On-Chip Memory)。
- 中间结果暂存:仅在 解析阶段(Resolve) 将Tile结果合并到系统内存的Framebuffer,减少频繁写入。
- 隐藏面消除(HSR/LRZ):
- 提前剔除被遮挡的像素,仅对 可见像素 进行纹理采样和光照计算,减少无效带宽消耗。
- 纹理读取的局部性优化:
- 同一Tile内的像素共享纹理数据,片上缓存(如L2缓存)可高效复用,减少系统内存访问。
(2) 前向渲染的流程优化 #
- 逐Tile处理:
- 每个Tile的渲染在片上内存完成,仅需读取 当前Tile相关的纹理和几何数据。
- 无需存储Gbuffer:颜色和深度数据直接暂存于Tile Buffer,最终合并到Framebuffer。
- 过绘制(Overdraw)的减少:
- HSR/LRZ技术剔除被遮挡像素,减少纹理和着色计算的带宽需求。
(3) 知识库依据 #
- 知识库[2][5][7] 强调:
- TBDR通过 片上内存 存储中间数据,仅最终合并时写入系统内存,显著降低带宽。
- HSR/LRZ技术可将Overdraw降至接近1,减少无效像素的纹理读取。
3. 带宽压力对比:延迟渲染 vs 前向渲染 #
| 维度 | 延迟渲染(Gbuffer + IMR) | 前向渲染(+ TBDR) |
|---|---|---|
| Gbuffer存储需求 | 需存储多张RT(如Position、Normal、Albedo等),带宽随RT数量线性增长。 | 无需Gbuffer,仅存储颜色和深度数据,带宽需求更低。 |
| 系统内存访问频率 | 每个Pass需读取所有RT数据(如每个光源需读取Gbuffer),导致 高频系统内存访问。 | 仅最终合并时写入系统内存,中间数据在片上内存处理, 系统内存访问频率低。 |
| 纹理读取优化 | 纹理数据需多次读取(如每个光源读取Gbuffer),无片上缓存优化。 | 纹理数据通过片上缓存复用,且仅处理可见像素, 带宽消耗显著降低。 |
| 抗锯齿开销 | MSAA需存储多倍样本数据,Gbuffer带宽压力进一步增加。 | TBDR的 片上MSAA 可暂存多样本数据,减少系统内存带宽需求。 |
| 移动设备适用性 | 移动端显存带宽有限,Gbuffer的高带宽需求导致性能瓶颈(如知识库[4]提到的2GB/s vs 30GB/s总带宽)。 | TBDR的优化使其在移动端成为主流,前向渲染与TBDR协同降低带宽压力。 |
4. 具体场景示例 #
场景:1080p屏幕,4光源 #
- 延迟渲染(Gbuffer + IMR):
- Gbuffer带宽:假设每像素存储4个通道(如Position、Normal、Albedo、Depth),8bit/通道:
- 单帧带宽 = 1920×1080 × 4通道 × 8bit × 60fps ≈ 2.5GB/s。
- 光照阶段带宽:每个光源需读取Gbuffer数据,4光源总带宽 ≈ 10GB/s。
- Gbuffer带宽:假设每像素存储4个通道(如Position、Normal、Albedo、Depth),8bit/通道:
- 前向渲染(+ TBDR):
- 纹理读取:仅对可见像素进行光照计算,假设Overdraw减少为1,带宽 ≈ 1920×1080 × 4光源 × 0.2(缓存命中) ≈ 0.8GB/s。
- 系统内存写入:仅最终合并时写入Framebuffer,带宽 ≈ 0.5GB/s。
5. 总结:带宽压力差异的核心原因 #
- 延迟渲染(Gbuffer + IMR):
- 带宽杀手:多张RT的存储与高频读写、无片上内存优化导致带宽需求激增。
- 移动端不友好:显存带宽有限,Gbuffer的高开销易触发带宽瓶颈。
- 前向渲染(+ TBDR):
- 带宽优化:利用片上内存暂存数据、HSR剔除无效像素、纹理缓存复用,显著降低系统内存访问。
- 移动端首选:与TBDR架构协同,平衡性能与功耗,适合移动设备的典型场景(少光源、透明物体)。
类比理解 #
- 延迟渲染(Gbuffer + IMR):像快递公司每次配送都要先建一个庞大的中央仓库(Gbuffer),再多次往返取货送货,导致交通拥堵(带宽不足)。
- 前向渲染(+ TBDR):快递员分片区配送(分块),每个片区的货物暂存在本地仓库(片上内存),仅最终合并到中央仓库,减少重复运输。